
#!/usr/bin/env python3
from gpiozero import Servo
from time import sleep
miservo = Servo(17)
while True:
miservo.min() # ó miservo.value = -1
sleep(1)
miservo.mid() # ó miservo.value = 0
sleep(1)
miservo.max() # ó miservo.value = +1
sleep(1)
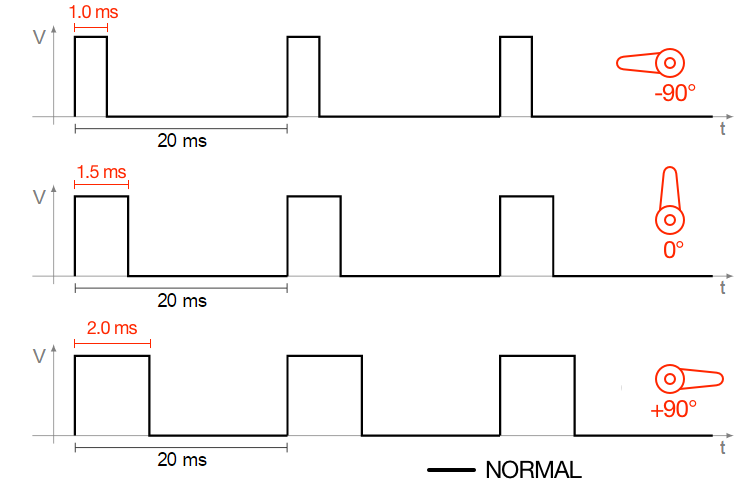
Configuración estándar de un Servo en RPi gpiozero
#!/usr/bin/env python3
from gpiozero import Servo
from time import sleep
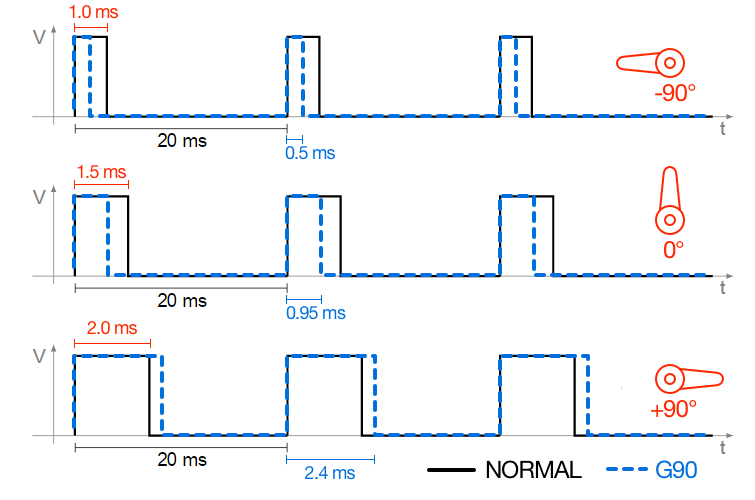
miservo = Servo(17,
min_pulse_width = 500/1000000, # = 500 µs = 0.5 ms
max_pulse_width = 2400/1000000, # = 2400 µs = 2.4 ms
frame_width = 20000/1000000 # = 20000 µs = 20.0 ms
)
while True:
miservo.value = -1 # ó miservo.min()
sleep(1)
miservo.value = +1 # ó miservo.max()
sleep(1)