#!/usr/bin/env python3
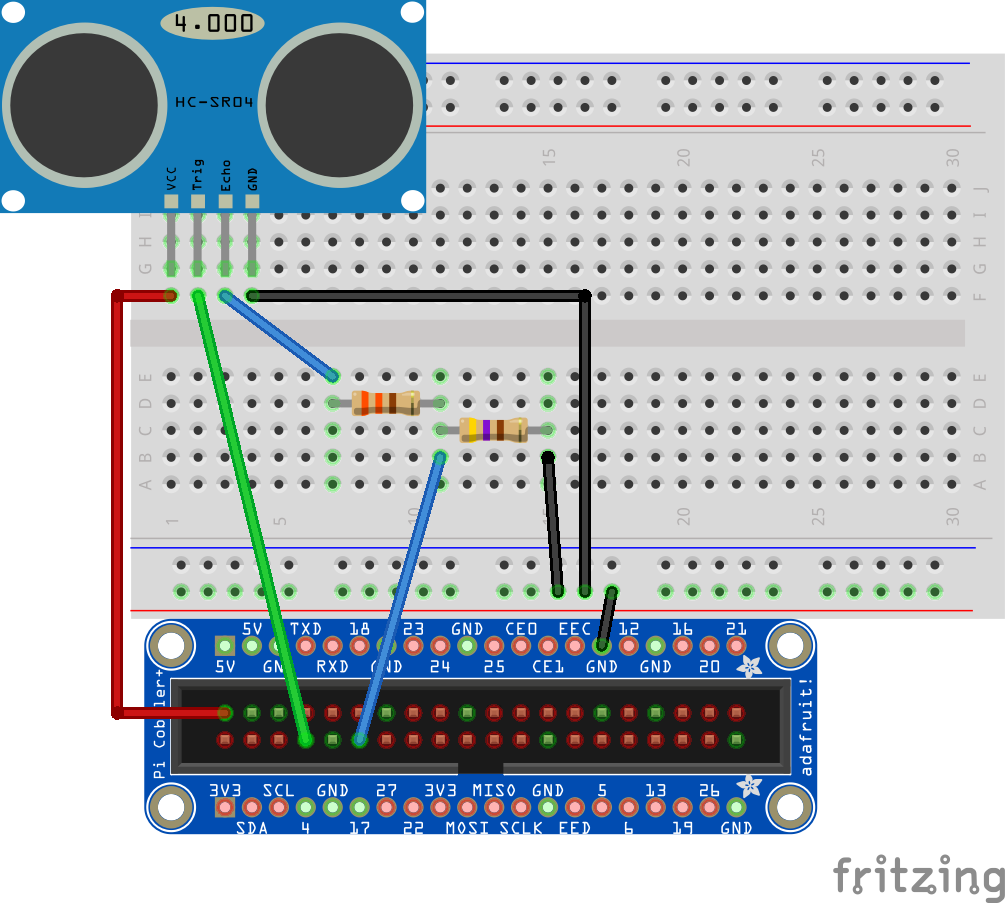
from gpiozero import DistanceSensor
ultrasonic = DistanceSensor(echo=17, trigger=4)
while True:
print(ultrasonic.distance)
#!/usr/bin/env python3
from gpiozero import DistanceSensor
ultrasonic = DistanceSensor(echo=17, trigger=4)
while True:
ultrasonic.wait_for_in_range()
print("In range")
ultrasonic.wait_for_out_of_range()
print("Out of range")
Opción 1 (constructor)
ultrasonic = DistanceSensor(echo=17, trigger=4, threshold_distance=0.5)
Opción 2 (método)
ultrasonic.threshold_distance = 0.5
Opción 1 (constructor)
ultrasonic = DistanceSensor(echo=17, trigger=4, max_distance=2)
Opción 2 (método)
ultrasonic.max_distance = 2
#!/usr/bin/env python3
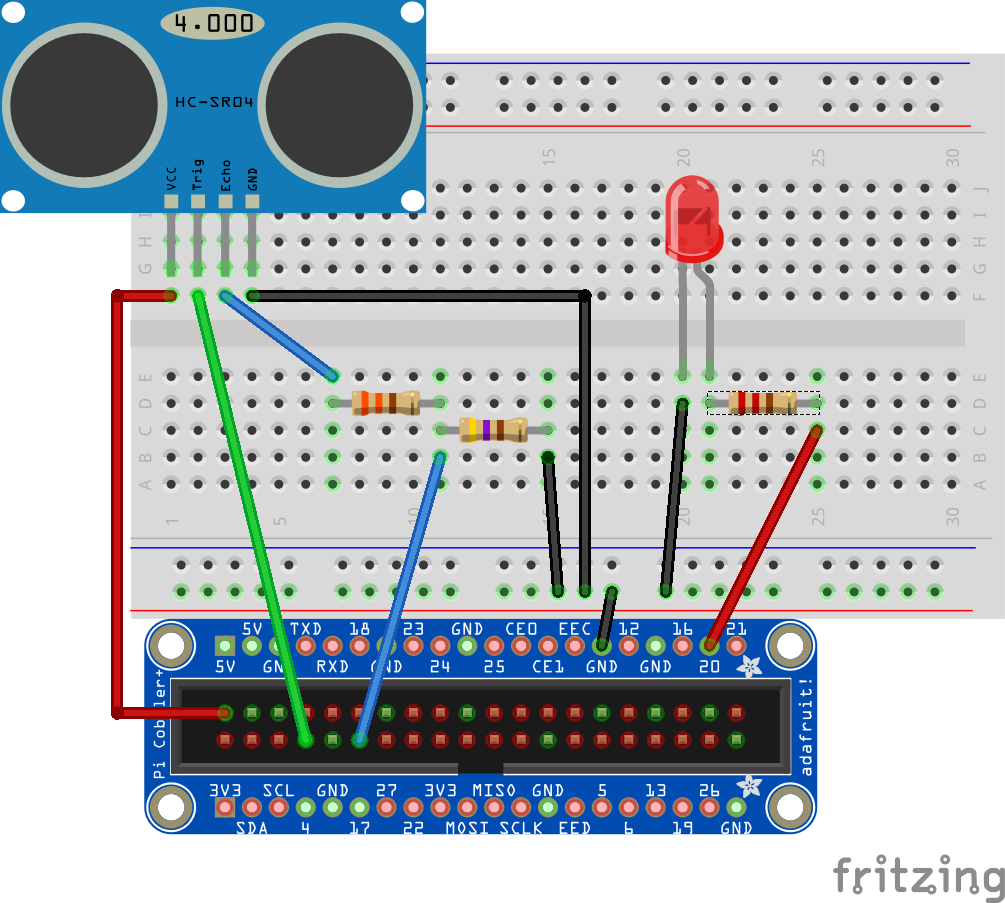
from gpiozero import DistanceSensor, LED
ultrasonic = DistanceSensor(echo=17, trigger=4)
led = LED(20)
while True:
ultrasonic.wait_for_in_range()
led.on()
ultrasonic.wait_for_out_of_range()
led.off()
Las funciones wait_for son bloqueantes.
when
#!/usr/bin/env python3
from gpiozero import DistanceSensor, LED
ultrasonic = DistanceSensor(echo=17, trigger=4)
led = LED(20)
def hola():
led.on()
def adios():
led.off()
ultrasonic.when_in_range = hola
ultrasonic.when_out_of_range = adios